项目负责人及成员(含学号):彭静琳072018142 王世豪072018131 洪禧辰072018109 王浩阳072018126
指导教师:王林
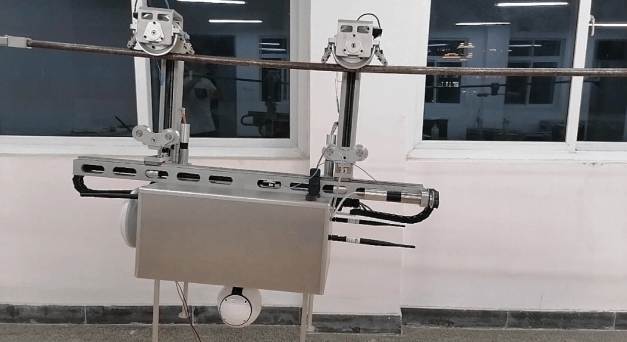
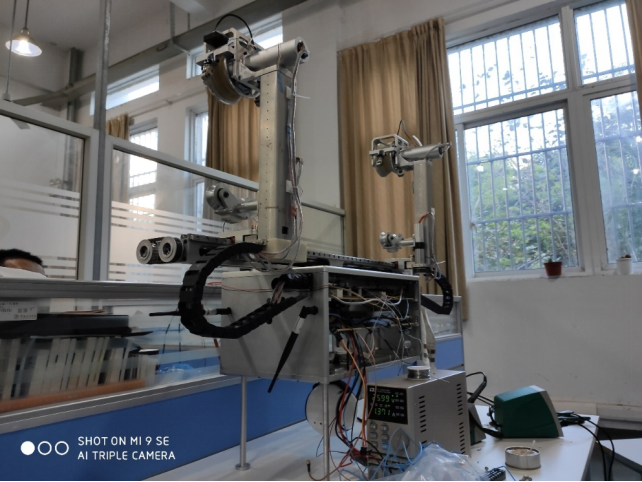
作品简介:架空线路智能巡检机器人工作于室外架空线路上,能够沿架空线路进行局部自主行走,能够利用其携带的双光相机对室外环境、人群进行监测。机器人具有无线数据收发模块和无线图像传输模块,操作人员能够利用地面基站进行机器人的遥操作,能够获取监控图像信息。本机器人具有广泛的应用场合,如火车站室外监测、边防、景区关键区域监控等。
创新点:本机器人沿架空线路行走,不占用地面空间,不对人群产生干扰;
本机器人携带双光相机,能够全天候工作,获取的图像信息清晰;
本机器人具有无线数据传输和无线图像传输功能,操作人员能够在室内实现对机器人的遥操作;
本机器人具有良好的局部自主能力,能够降低操作人员的劳动强度。
应用场景:能够应用于人员密集区域监控场合、电力配电室、工厂巡检、机房、边防、景区关键区域监控等场合。
作品成果
、